 平台热线
平台热线



大部分的机器人虚拟仿真软件都具备柔性管线包仿真功能,PDPS软件也不例外。PDPS软件具有两种机器人柔性管线包虚拟仿真方法,一种是使用外部导入的柔性管线包模型进行虚拟仿真,另一种是使用软件内置的“线缆”创建工具自定义柔性管线包进行虚拟仿真。
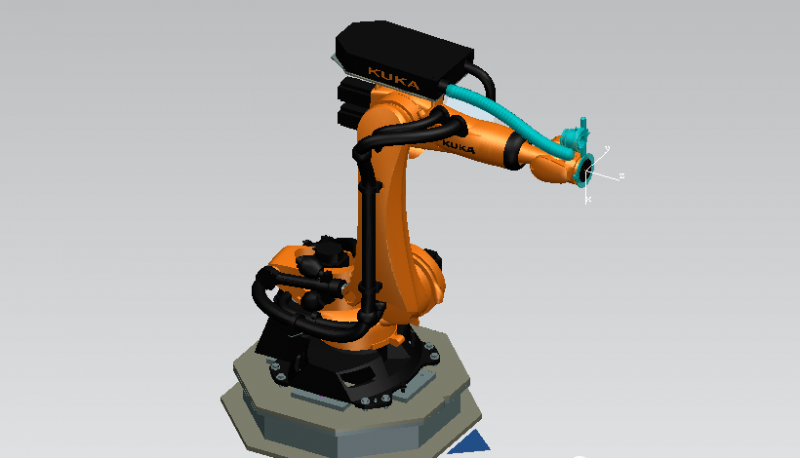
机器人管线包模型导入:
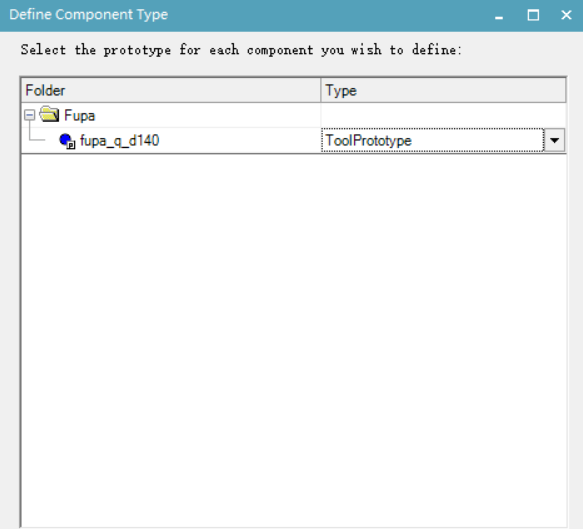
将准备好的管线包模型导入PDPS软件,在导入之前首先要定义管线包的类型,通常情况下管线包模型被定义为“ToolPrototype”类型,而机器人本体模型则仍然定义为“Robot”类型。
机器人管线包模型放置到机器人:
在Process Simulate软件左侧的对象浏览树Object Tree中,将管线包模型切换为显示状态,使其在软件工作区中显示。
交替使用“Relocate”和“Placement Manipulator”快捷工具命令,将管线包模型放置到机器人上。放置过程中可以先使用“Relocate”快捷工具命令,在To frame后选择机器人的TCP坐标系,对管线包模型进行初步重定位操作。
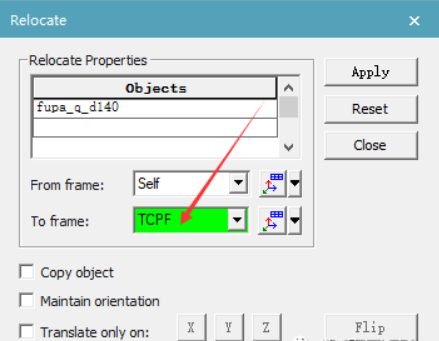
然后再使用“Placement Manipulator”快捷工具命令,对管线包模型的角度和位置进行***调整,使得管线包支撑架(俗称网球拍)卡在机器人J6关节法兰盘的合适位置处。
更多机器人资讯请咨询:机器人管线包

